Location Corrections
Most drones utilize GPS for location, however without corrections, the drones internal GPS units are not very accurate. There are a few methods to correct for this issue.
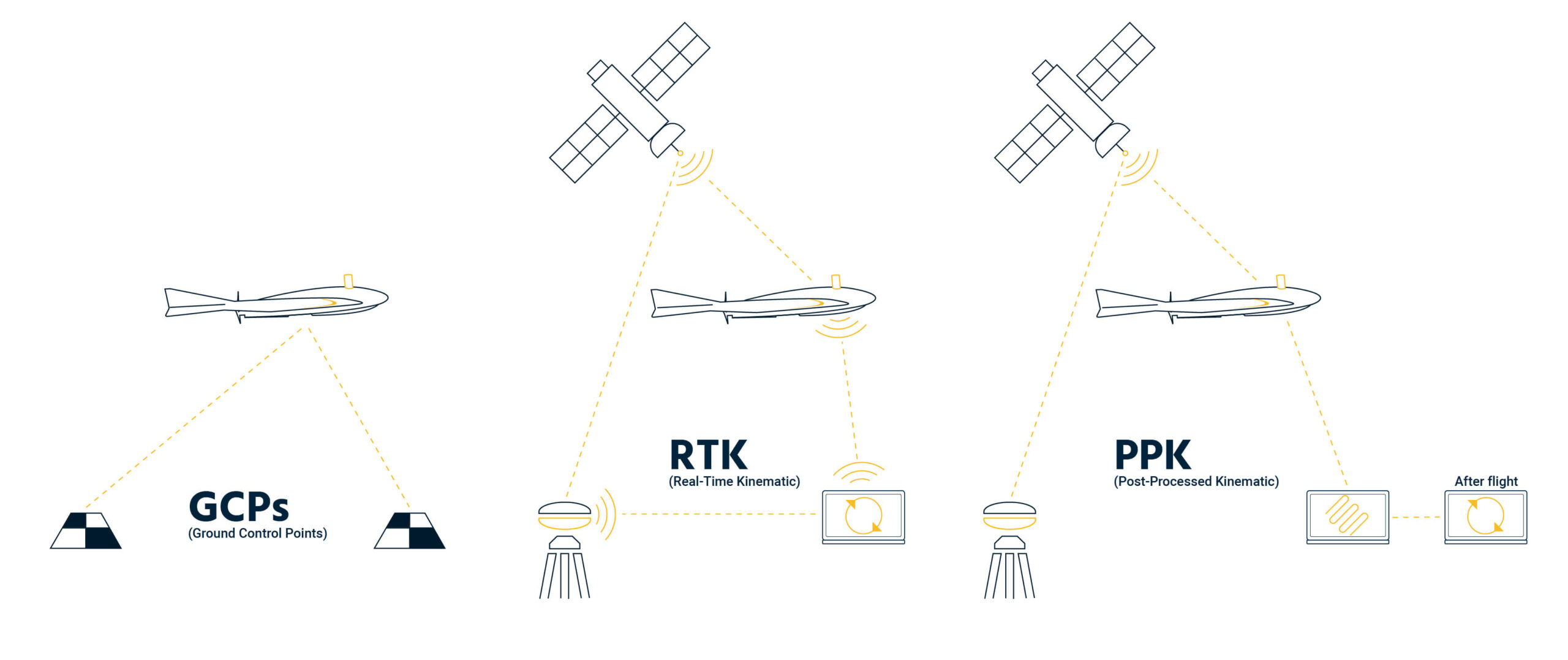
Ground Control Points (GCP)
This method applies corrections during the photogrammetry processing stage. To use it, a surveyor places targets at known locations evenly distributed across the project area, with a minimum of three required.
Real Time Kinematics (RTK)
This method makes the location corrections in real time while the drone is flying. This method requires a GPS base station in a fixed location near the flight location and typically an additional module on the drone. While flying the base station communicates with the flight control device and overhead satellites to properly triangulate the drone’s location.
Post Processing Kinematics (PPK)
This method of correction is done after flying and corrections are made as an additional step using data downloaded from a virtual base station. This method can be used when a base station is not available or proper satellite connection is unattainable. Like RTK, an additional module is required on the drone.